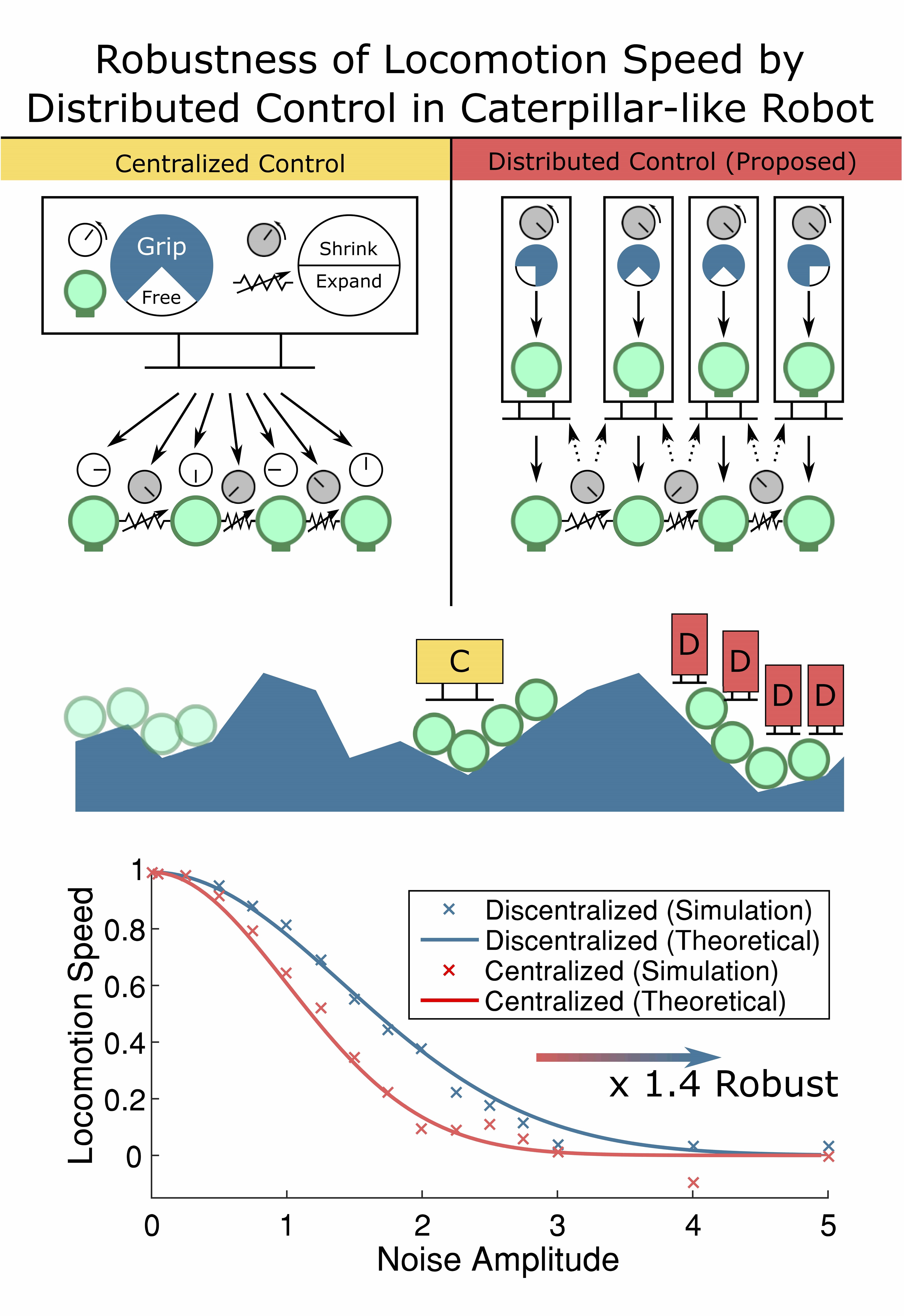
 細い枝の上や茂みの中など、ヒトではアクセスが難しい空間を活用するため、イモムシを模したソフト・ロボットを開発している。しかしイモムシの這行(しゃこう)運動の全容は実は解明されていない。我々はこの問題に数値シミュレーションで構成論的に挑んだ。足を順に一定周期で動かす従来の這行モデルを、前後の体節長を元に自律分散的に制御することで、体節の伸縮のタイミングのズレによる進行速度の低下を約0.7倍に抑えた。
細い枝の上や茂みの中など、ヒトではアクセスが難しい空間を活用するため、イモムシを模したソフト・ロボットを開発している。しかしイモムシの這行(しゃこう)運動の全容は実は解明されていない。我々はこの問題に数値シミュレーションで構成論的に挑んだ。足を順に一定周期で動かす従来の這行モデルを、前後の体節長を元に自律分散的に制御することで、体節の伸縮のタイミングのズレによる進行速度の低下を約0.7倍に抑えた。
Fuminori Okuya, Takuya Umedachi, Yoshihiro Kawahara
Contact: okuya23@akg.t.u-tokyo.ac.jp