 多くのソフトロボットが1つの変形モード(曲げか伸縮)しか使わないのに対し,生き物は複数の変形モードを巧みに活用し適応的な振る舞いを生み出す。そこで我々は曲げかつ圧縮変形可能なイモムシロボットを開発した。数値実験並びに実機実験にて、体軸方向に柔らかい方が移動速度が上昇することを突き止めた。このような複数の変形モードが共存するソフトロボットの設計により、振る舞いの多様性と適応性の向上が期待できる。
多くのソフトロボットが1つの変形モード(曲げか伸縮)しか使わないのに対し,生き物は複数の変形モードを巧みに活用し適応的な振る舞いを生み出す。そこで我々は曲げかつ圧縮変形可能なイモムシロボットを開発した。数値実験並びに実機実験にて、体軸方向に柔らかい方が移動速度が上昇することを突き止めた。このような複数の変形モードが共存するソフトロボットの設計により、振る舞いの多様性と適応性の向上が期待できる。
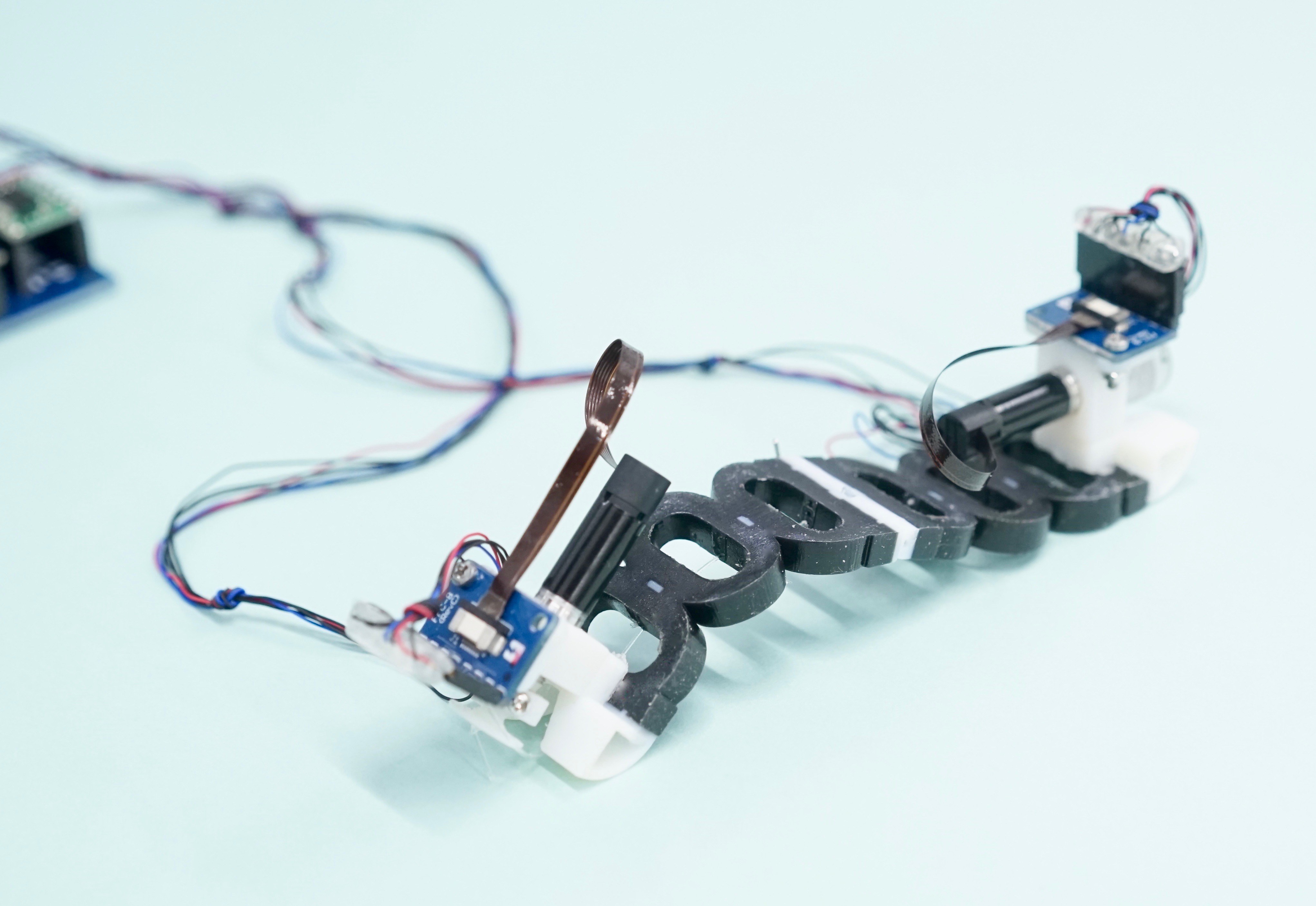
Multimodal deformations of soft materials (e.g., compression and bending) are a commonplace event on soft-bodied animals (e.g., worms). We proposed to use multiple deformation modes and presents a highly deformable crawling robot that employs both compression and bending deformations simultaneously during locomotion. Combination of multiple deformation modes allows us to design an enormous variety of adaptive locomotion gaits of soft-bodied robots.
Takuya Umedachi, Yoshihiro Kawahara
Contact: umedachi@akg.t.u-tokyo.ac.jp