Skip to content
KAWAHARA LABORATORY
Toggle Navigation
MENU
ABOUT
MEMBER
RESEARCH
Publications
AWARDS & MEDIA
NEWS
ACCESS
RESEARCH GROUP
ALL
Human computer interaction / Digital fabrication
Inclusive Wearable
Network
Robotics
Sensing and data mining
Sensor systems
Smart agriculture
Wireless power transfer / Energy harvesting
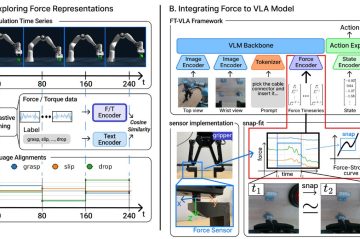
力触覚モダリティの解釈及び手応えを理解する行動生成モデルの構築
Interpretation of Haptic Modality and Construction of a Behavior Generation Model for Understanding Interaction Feedback
話者非依存日本手話認識におけるMovement-Holdモデルに基づくキーフレーム選択の有効性と課題
Effectiveness and Challenges of keyframe selection based on the Movement-Hold model for Signer-Independent Japanese Sign Language recognition
大規模言語モデルによる探索誘導を用いたモデルフリー強化学習空調制御の学習効率の向上
Improving Learning Efficiency of Model-Free Reinforcement Learning for HVAC Control via Large Language Model-Guided Exploration
磁気応答粘弾性材料を用いた力計測・厚み調整・自己修復機能を有するソフトロボットスキンに関する研究
Soft Robotic Skin with Force Sensing, Thickness Adjustment, and Self-Healing Capability Using Magnetically Responsive Viscoelastic Materials
超低電力な指輪型無線マウス
Ultra-low-power ring-based wireless mouse
反射波に着目した屋内音響測位
Indoor Acoustic Localization Using Multipath Reflections
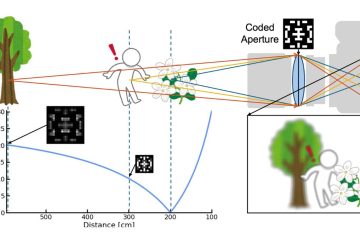
単眼ウェアラブルカメラ画像による深度分類のための符号化開口の最適化
Single-Image Depth Thresholding Using Wearable Cameras and an Optimized Coded Aperture
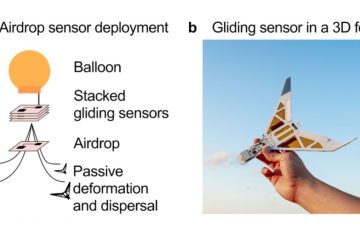
平面積載可能な空中散布型センサのための回路基板を用いたパッシブ弾性変形機構
Passive Elastic-Folding Mechanisms using Printed Circuit Boards for Stackable Airdrop Sensors
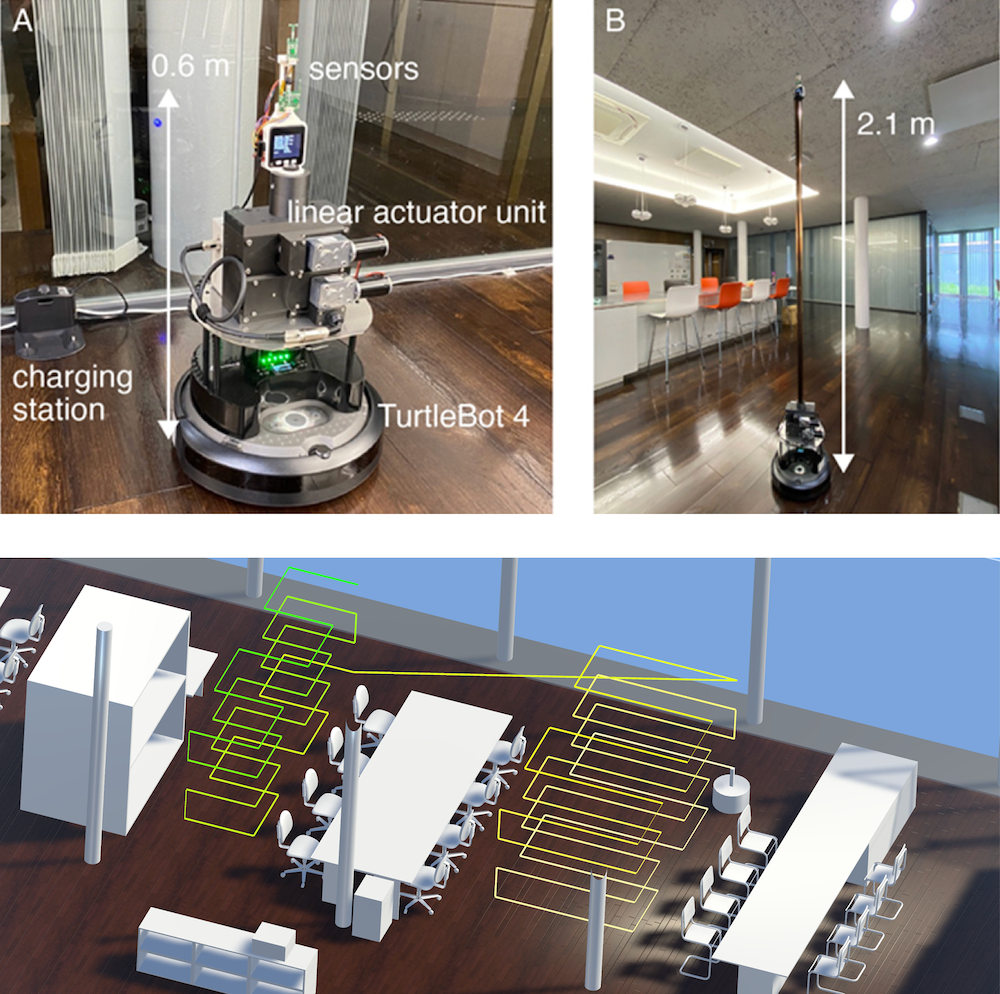
Acquisition and Visualization of HVAC Data by Autonomous Mobile Robots
Modeling The States of Liquid Phase Change Pouch Actuators by Reservoir Computing
重心設計と形状編集
Deformation algorithm to manipulate the center of mass
LLMによる触覚解釈に基づくロボットマニピュレーションの行動選択
Action Selection in Robotic Manipulation Based on Tactile Interpretation Using LLM
asEars: 片耳難聴者の聞こえを支援するデバイス
asEars: Hearing assistance device for people with single-sided deafness
変形可能な二次元無線給電システム
Shape-Reconfigurable 2-D Wireless Power Transfer System
磁気粘弾性材料を用いたソフトロボットスキン
Soft Robot Skin Using Magnetorheological Materials
投稿ナビゲーション
過去の投稿