Skip to content
KAWAHARA LABORATORY
Toggle Navigation
MENU
ABOUT
MEMBER
RESEARCH
Publications
AWARDS & MEDIA
NEWS
ACCESS
RESEARCH GROUP
ALL
Human computer interaction / Digital fabrication
Inclusive Wearable
Network
Robotics
Sensing and data mining
Sensor systems
Smart agriculture
Wireless power transfer / Energy harvesting
全身無線給電・通信服
Wireless power and data networking around the body
インナーワイヤレスな移動関節型ヘビロボット
Joint-repositionable inner-wireless snake robot
キューブ型跳躍ロボット
Jumping Cube
パーソナルモビリティの操作支援
Operational Support for Personal Mobility
レーザーエネルギー伝送を活用した触覚提示
Mid-air haptic display using laser energy transmission
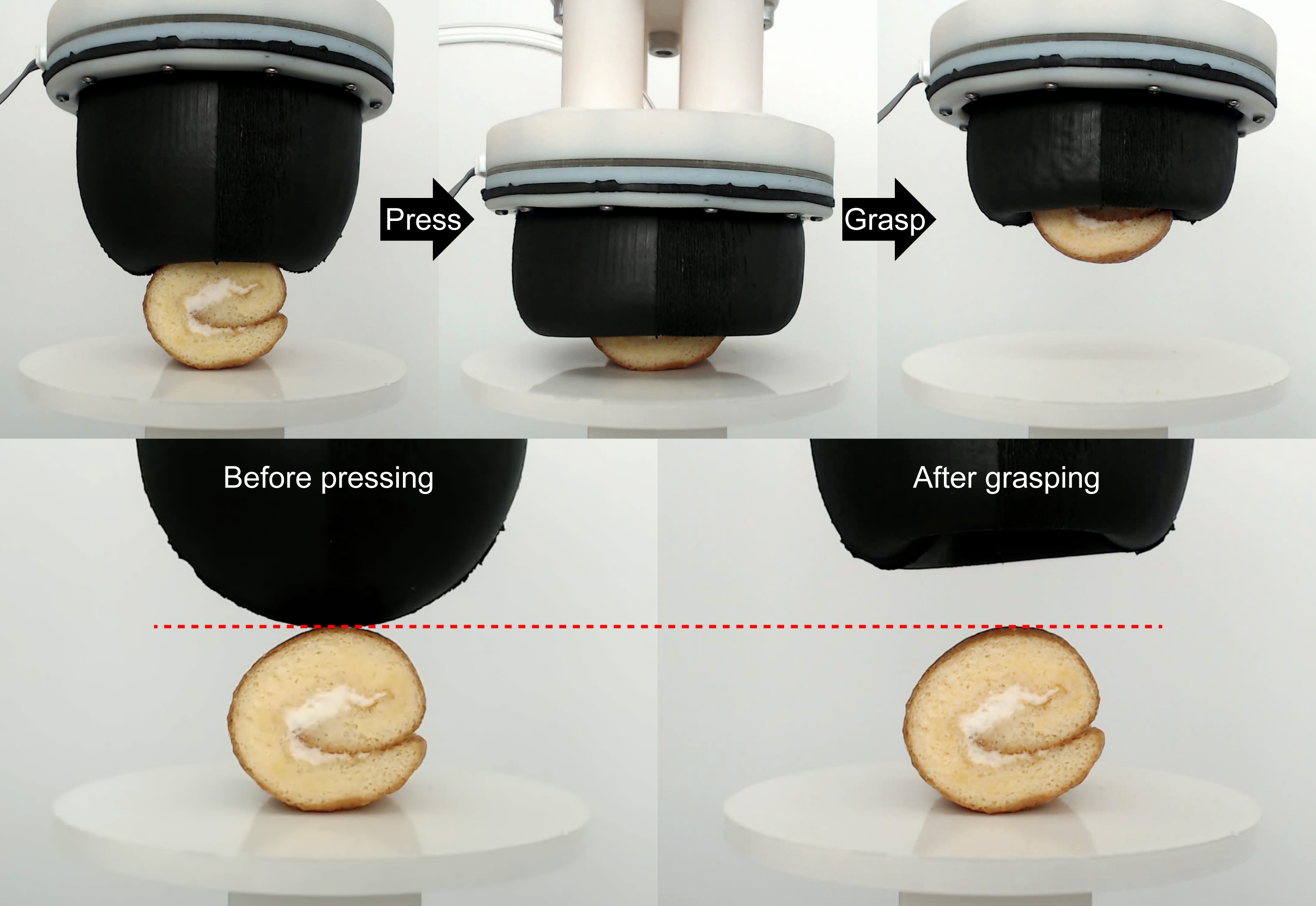
繊細なジャミング把持:永久磁石エラストマ膜を用いた壊れやすい把持対象の変形検出
Delicate Jamming Grasp: Detecting Deformation of Fragile Objects Using Permanent Magnet Elastomer Membrane
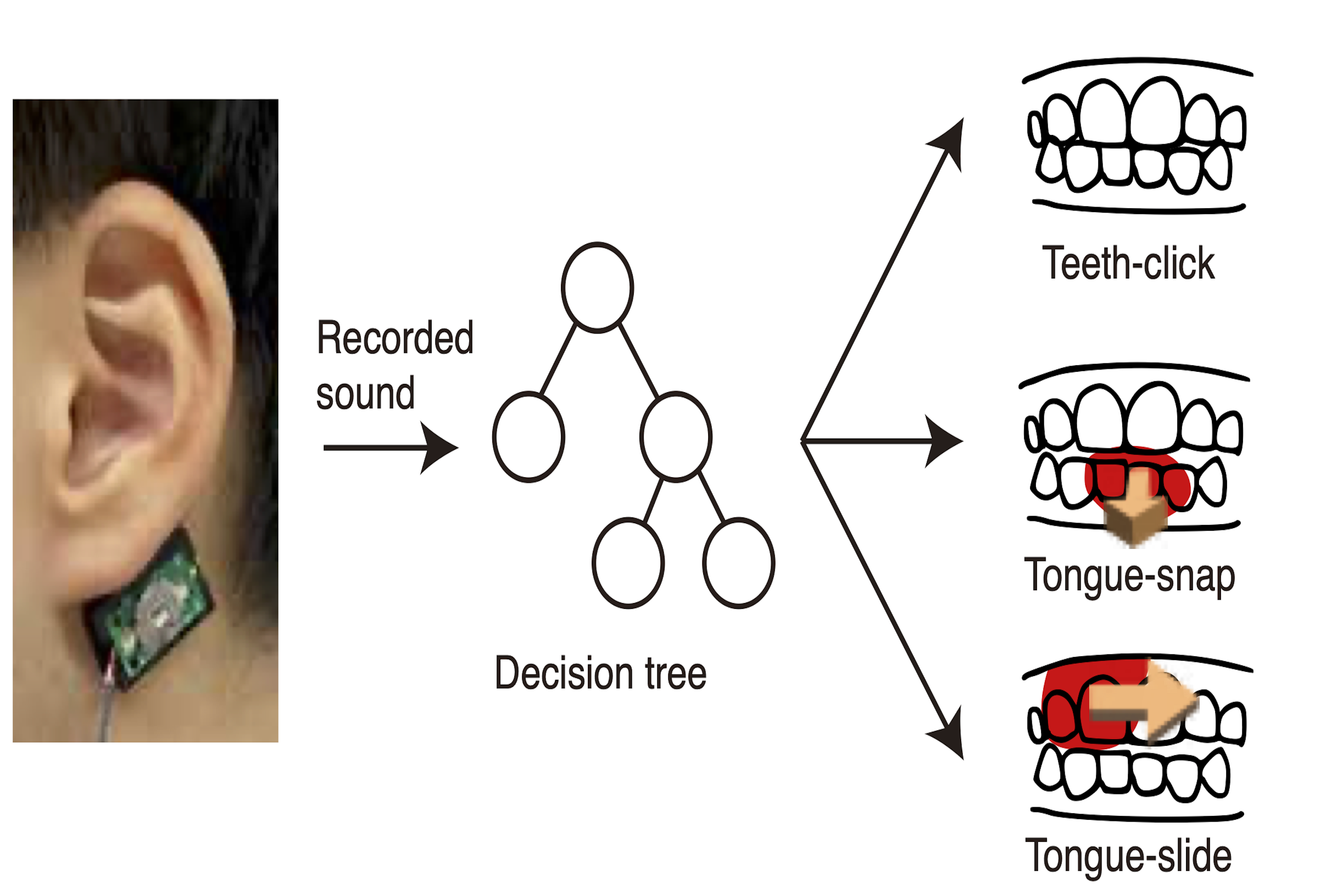
骨導音を用いた口内のマイクロジェスチャ認識手法
Micro-Gesture Recognition of Mouth via Bone Conduction Sound
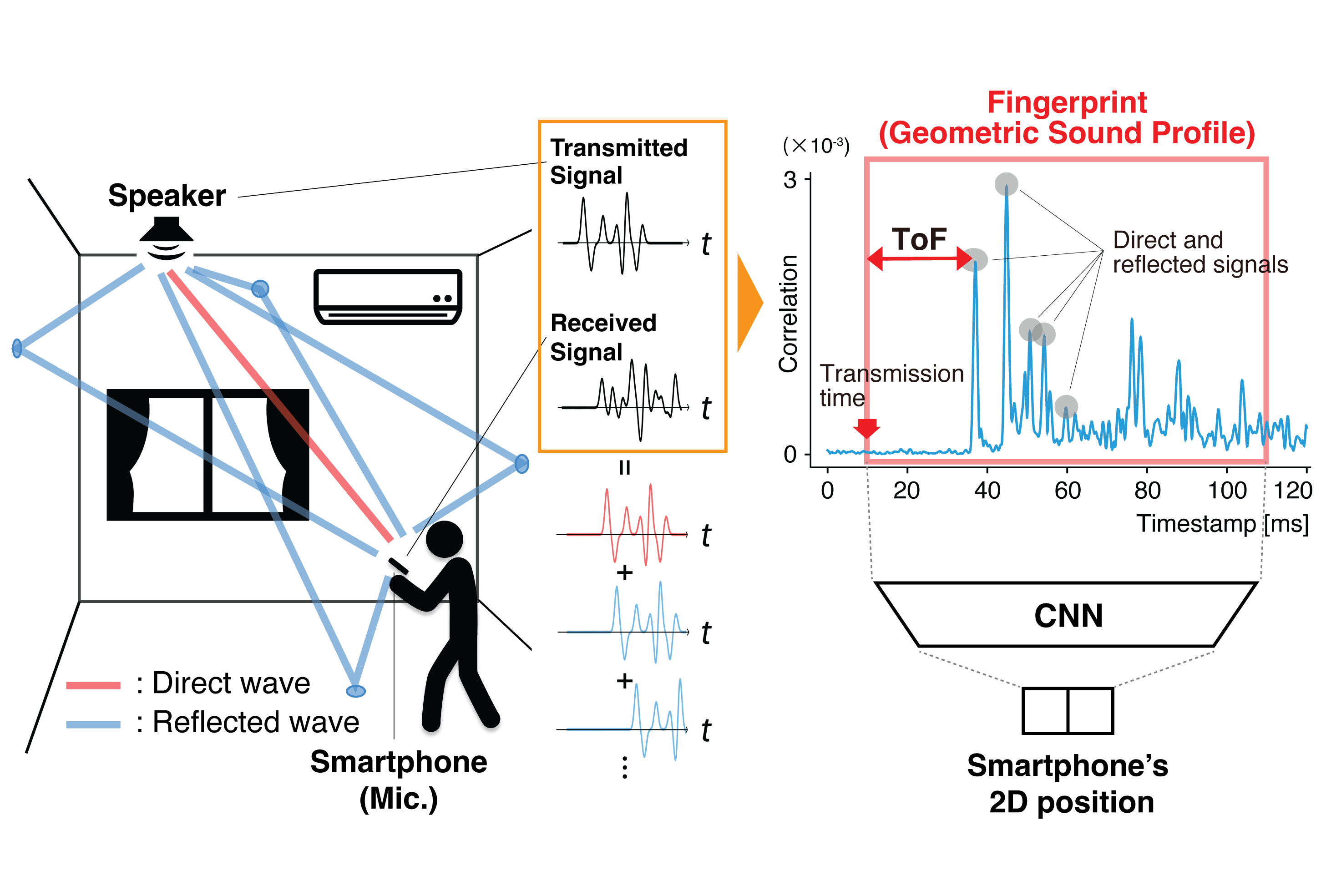
多重反射波のTime-of-Flight情報が組み込まれた位置指紋による頑健で高精度な屋内音響測位手法
Robust and Accurate Indoor Acoustic Positioning Using Position Fingerprints Incorporating Time-of-Flight from Multiple Reflected Waves
発電量と美観性を両立する樹木型太陽光発電システムの設計
Design of Tree-Mimicking Solar Photovoltaic System Achieving Both Power Generation and Acceptability
やわらかい身体を利用した不整地・狭小空間でのモビリティ走行制御
Smart Mobility Control Using Soft Body in Rough Terrain and Narrow Spaces
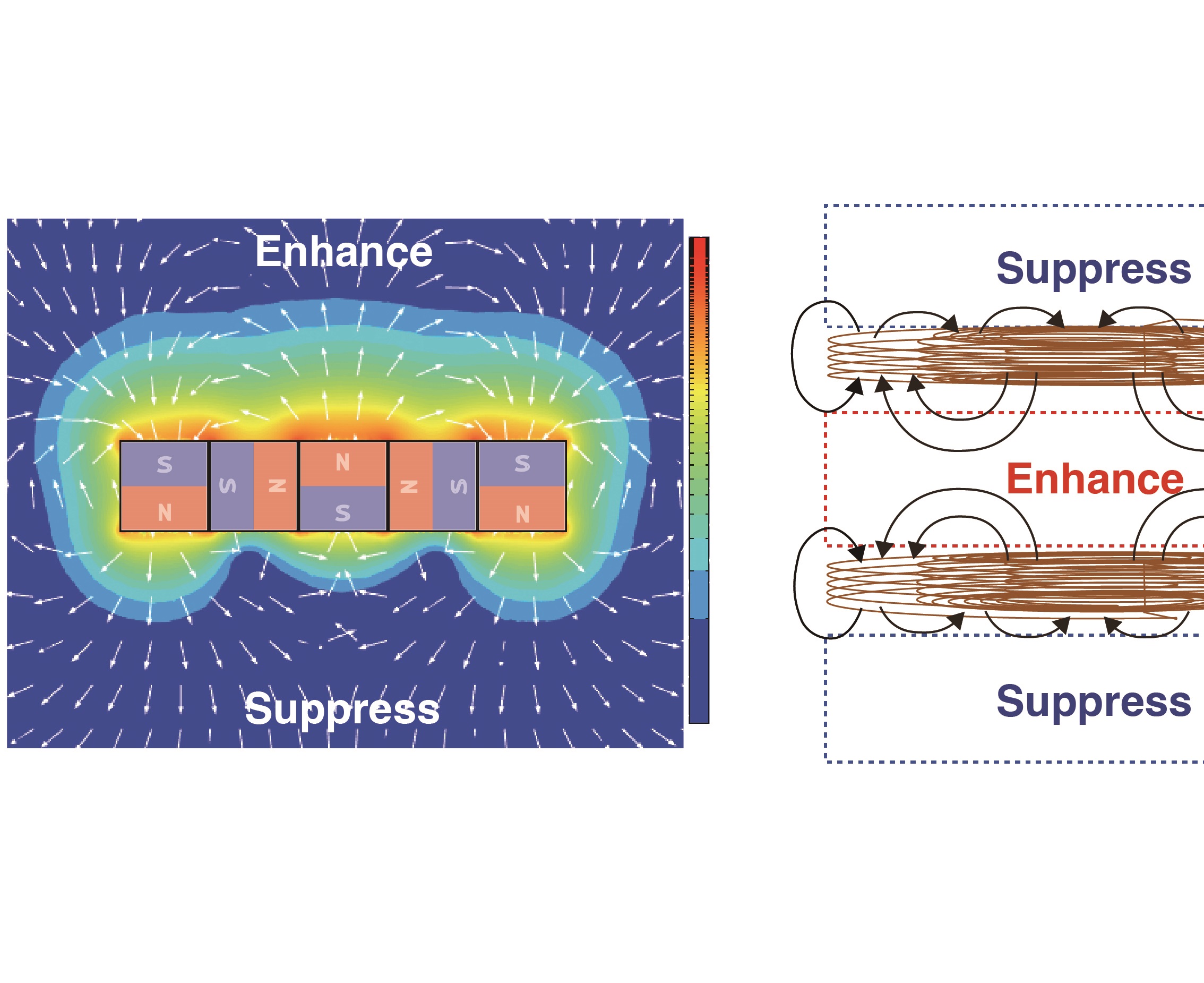
無線電力伝送における漏洩磁界抑制のためのハルバッハ配列共振器
Suppressing Leakage Magnetic Field in Wireless Power Transfer using Halbach Array-Based Resonators
梱包形状の設計に向けた立体形状の再構成手法
Reusing Cardboard for Packaging Boxes with a Computational Design System
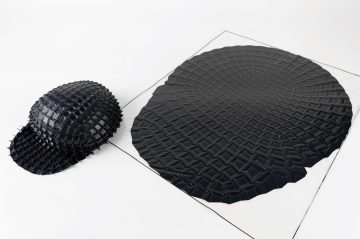
Inkjet 4D Print:インクジェットUVプリントによる折紙テセレーションの自己折り
Inkjet 4D Print: Self-folding Tessellated Origami Objects by Inkjet UV Printing
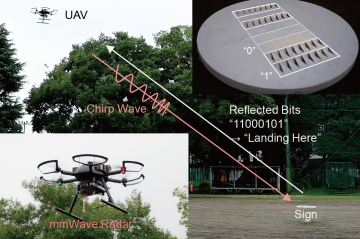
ミリ波レーダを用いて視界不良下で読み取れるUAV誘導標識(NTT共同研究)
Millimeter-Wave based Passive Signs for Guiding UAVs in Poor Visibility Conditions (NTT Joint Research)
2次元平面上の曲線に追従する3Dプリンタブルなジッパーの設計と検証
Design and validation of 3D printable zippers that follow curves on a plane
投稿ナビゲーション
過去の投稿
新しい投稿