現代のスマートビルにおける空調(HVAC)システムの効率的な制御は、省エネルギー化と室内快適性の維持に向けた喫緊の課題である。しかし、固定センサを用いた従来の計測手法は、設置場所の制約により空間的な死角が生じやすく、複雑な3次元の気流や温度分布を正確に捉えることが困難であった。
本研究は、固定センサでは計測できない高所や局所領域を含む建物全体の環境データを、高密度かつ動的に収集・可視化するシステムの構築を目的とする。
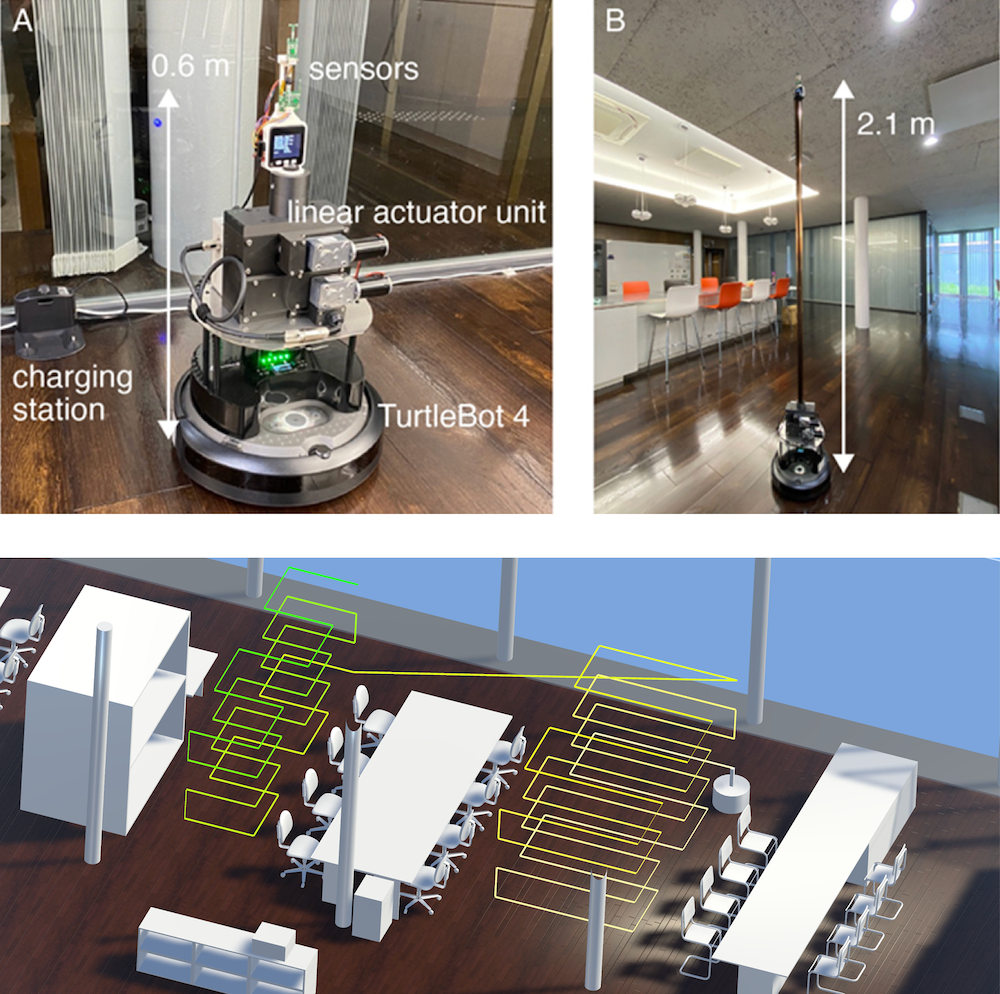
この課題に対し、我々は伸縮アームと多種環境センサを搭載した自律移動ロボットを用い、3次元空間を走査的に計測する手法を提案した。さらに、取得した風速ベクトルや温度データをロボットの位置情報と同期させ、デジタルツイン環境上で直感的に可視化する技術を開発した。実験の結果、移動ロボットによる計測は高価な固定センサ群を代替可能であり、導入コストを抑制しつつ、高精細かつリアルタイムな3次元環境マップの生成に成功した。
本成果は、詳細な環境情報に基づく精密な空調制御を可能にし、持続可能なビル管理および適応的な都市インフラの実現に寄与するものである。
Efficient control of Heating, Ventilation, and Air Conditioning (HVAC) systems in modern smart buildings is a pressing challenge for reducing energy consumption and maintaining indoor comfort. However, conventional measurement using fixed sensor networks often suffers from spatial blind spots due to installation constraints, making it difficult to capture complex three-dimensional airflow and temperature distributions. This study aims to construct a system capable of densely and dynamically collecting and visualizing environmental data across an entire building, including high-altitude and local areas inaccessible to fixed sensors.
To address this, we proposed a method employing an autonomous mobile robot equipped with a telescopic arm and various environmental sensors to scan the 3D space. Furthermore, we developed a technology to intuitively visualize acquired wind velocity vectors and temperature data within a digital twin environment by synchronizing them with the robot’s position. Experimental results demonstrated that mobile measurement can replace expensive sensor arrays, successfully generating high-definition, real-time 3D environmental maps while suppressing costs. These findings enable precise HVAC control based on detailed environmental information, contributing to sustainable building management and the realization of adaptive urban infrastructure.
C. Han, C. Caremel, K. Taniguchi, H. Murakami, K. Koike, K. Higashioka, Y. Toshima, Y. Akashi, Y. Kawahara
関連論文/Related Publications
C. Han, C. Caremel, K. Taniguchi, H. Murakami, K. Koike, K. Higashioka, Y. Toshima, Y. Akashi, and Y. Kawahara, “Acquisition and Visualization of HVAC Data by Autonomous Mobile Robots,” Proceedings of the 30th CAADRIA Conference, vol. 3, pp. 29-38, Tokyo, Japan, March 2025.
連絡先/Contact
cedric@akg.t.u-tokyo.ac.jp