 ソフトロボットに硬いセンサ/アクチュエータを取り付けると、柔軟性と設計の自由度が損なわれてしまう。そこで我々は、家庭用インクジェットプリンタで紙の上に銀ナノ粒子インクを印刷し、導電パターンをセンサ兼熱駆動アクチュエータとして使用するソフトロボットの製造方法を提案した。前処理や後処理が不要な本手法を使えば、低コストかつ短時間でソフトロボットを大量に製造できる。
ソフトロボットに硬いセンサ/アクチュエータを取り付けると、柔軟性と設計の自由度が損なわれてしまう。そこで我々は、家庭用インクジェットプリンタで紙の上に銀ナノ粒子インクを印刷し、導電パターンをセンサ兼熱駆動アクチュエータとして使用するソフトロボットの製造方法を提案した。前処理や後処理が不要な本手法を使えば、低コストかつ短時間でソフトロボットを大量に製造できる。
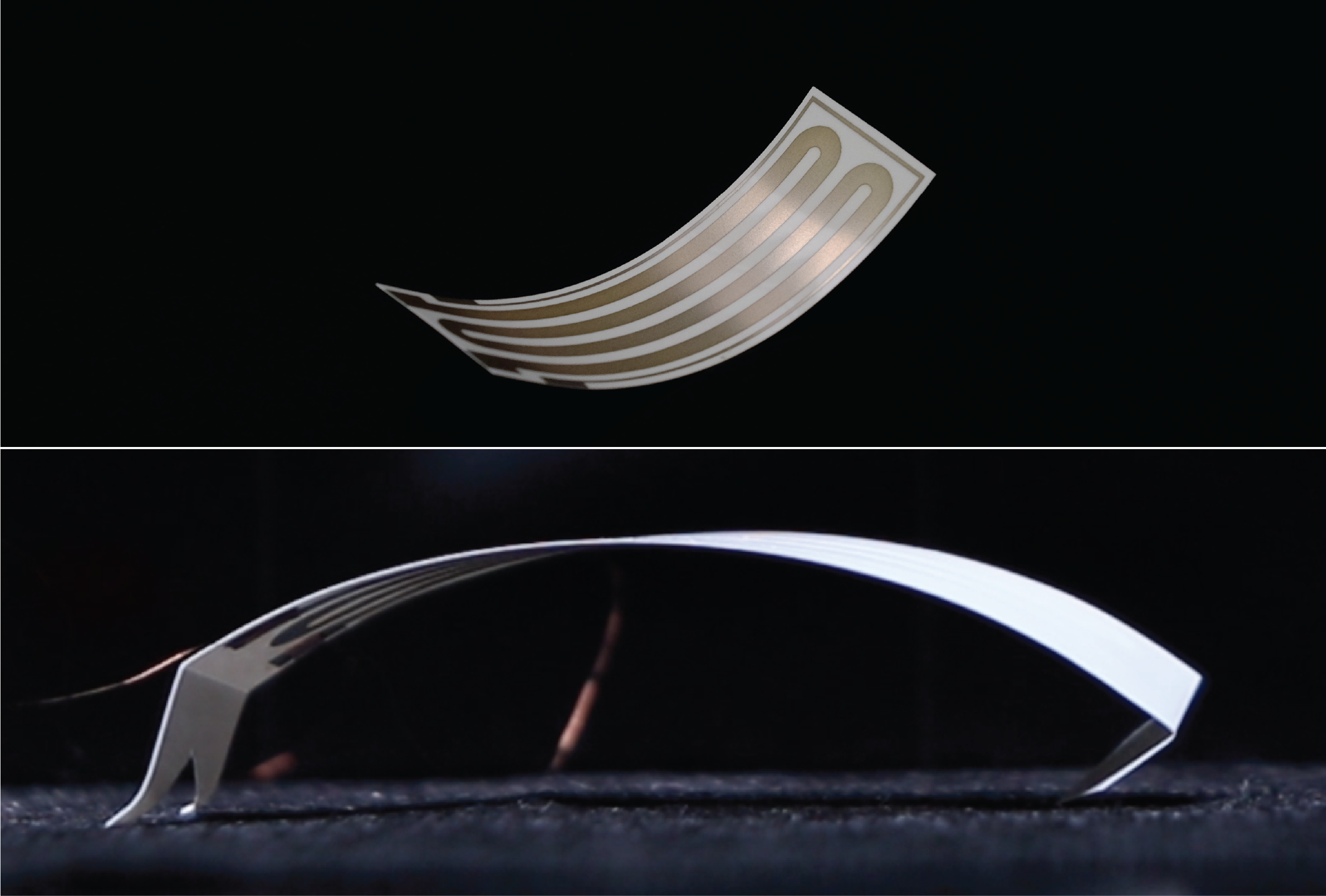
Soft-bodied robots are usually made by attaching rigid actuators and sensors to soft materials. This separation of rigid actuators and sensors has limited the design of soft-bodied robots. To add more flexibility in the design, we proposed to print sensors and actuators using silver nano-particle ink with home-commodity inkjet printers on paper substrates. We exemplified the concept with a single-pass printable bending sensors and thermal-based actuators to control an all-printed paper caterpillar robots.
Tung D. Ta, Takuya Umedachi, Yoshihiro Kawahara
Contact: tung@akg.t.u-tokyo.ac.jp