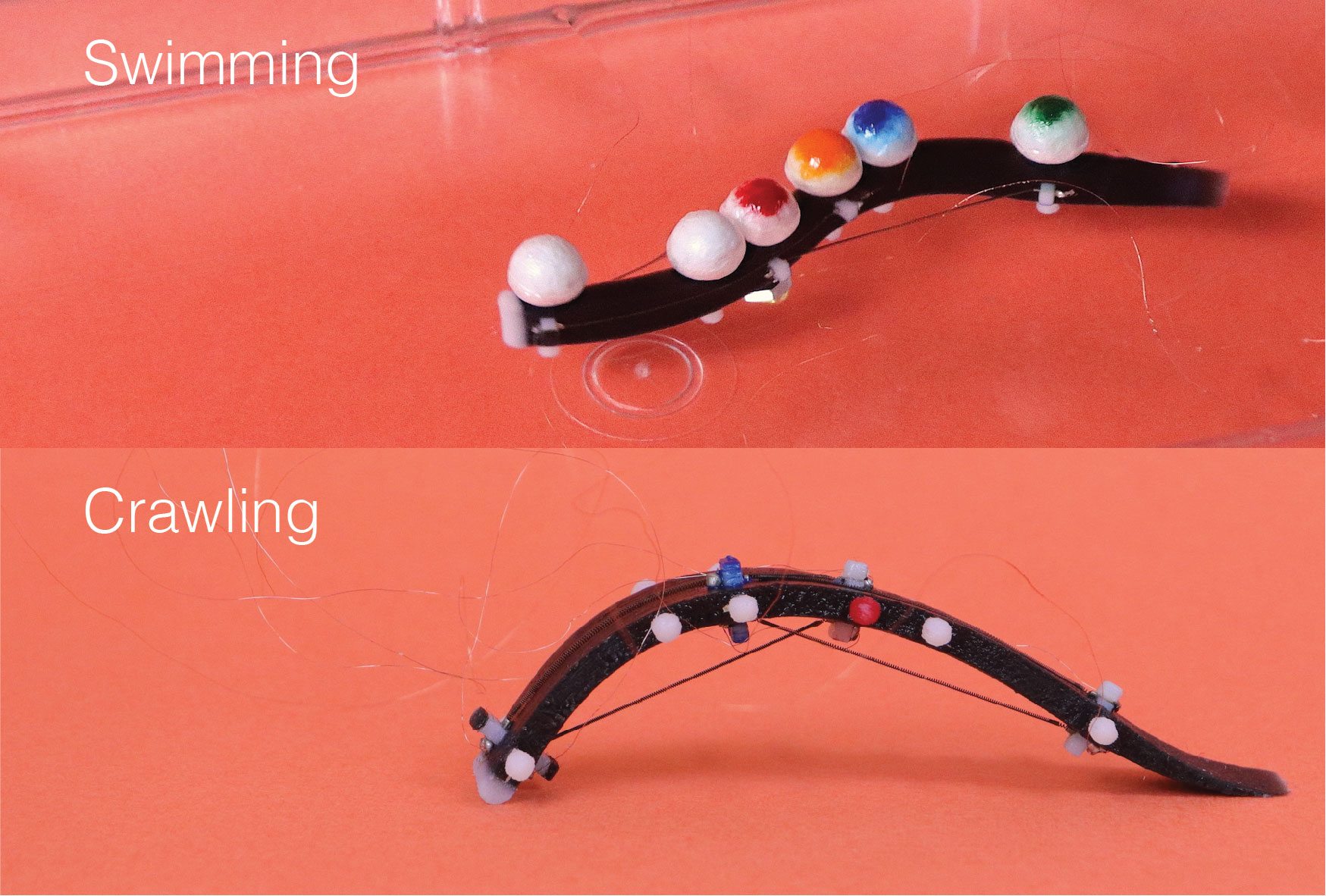
Soft-bodied robot research is paving ways for a new class of small-scale robots that can navigate a variety of environments with minimum influence on the environment itself. However, it is generally challenging to design miniature soft-bodied robots that efficiently adapt to the change between viscous environments. We proposed the overlapping snap-through buckling using coil shape memory alloys to design and control the undulation motion of a stringy soft robot. Based on this arrangement, we are able to make a stringy soft robot that is capable of crawling on dry surfaces and swimming in multiple viscous environments.
Tung D. Ta, Takuya Umedachi, Yoshihiro Kawahara
Contact: tung@akg.t.u-tokyo.ac.jp