 簡単な制御で対象を扱えるソフトロボットハンドに器用さと堅牢さを与えるには触覚センサが必要だが、既存のセンサは柔軟性や三次元の力検知に課題がある。そこで我々は、永久磁石エラストマを用いて自身の立体変形を検知可能な柔軟触覚センサを提案した。触覚センサ下部に並べられた磁気センサが磁場の変化を測定することでセンサの変形を推定する手法である。センサ内部の空間を自由に活用できる点と、センサ表面に回路素子を配置する必要がなく故障のリスクが低い点が、光学式のセンサや伸縮可能な圧力センサと比べ優れている。本センサは実験を通して、三次元の力検出や異なる立体変形の識別を行えることを示した。
簡単な制御で対象を扱えるソフトロボットハンドに器用さと堅牢さを与えるには触覚センサが必要だが、既存のセンサは柔軟性や三次元の力検知に課題がある。そこで我々は、永久磁石エラストマを用いて自身の立体変形を検知可能な柔軟触覚センサを提案した。触覚センサ下部に並べられた磁気センサが磁場の変化を測定することでセンサの変形を推定する手法である。センサ内部の空間を自由に活用できる点と、センサ表面に回路素子を配置する必要がなく故障のリスクが低い点が、光学式のセンサや伸縮可能な圧力センサと比べ優れている。本センサは実験を通して、三次元の力検出や異なる立体変形の識別を行えることを示した。
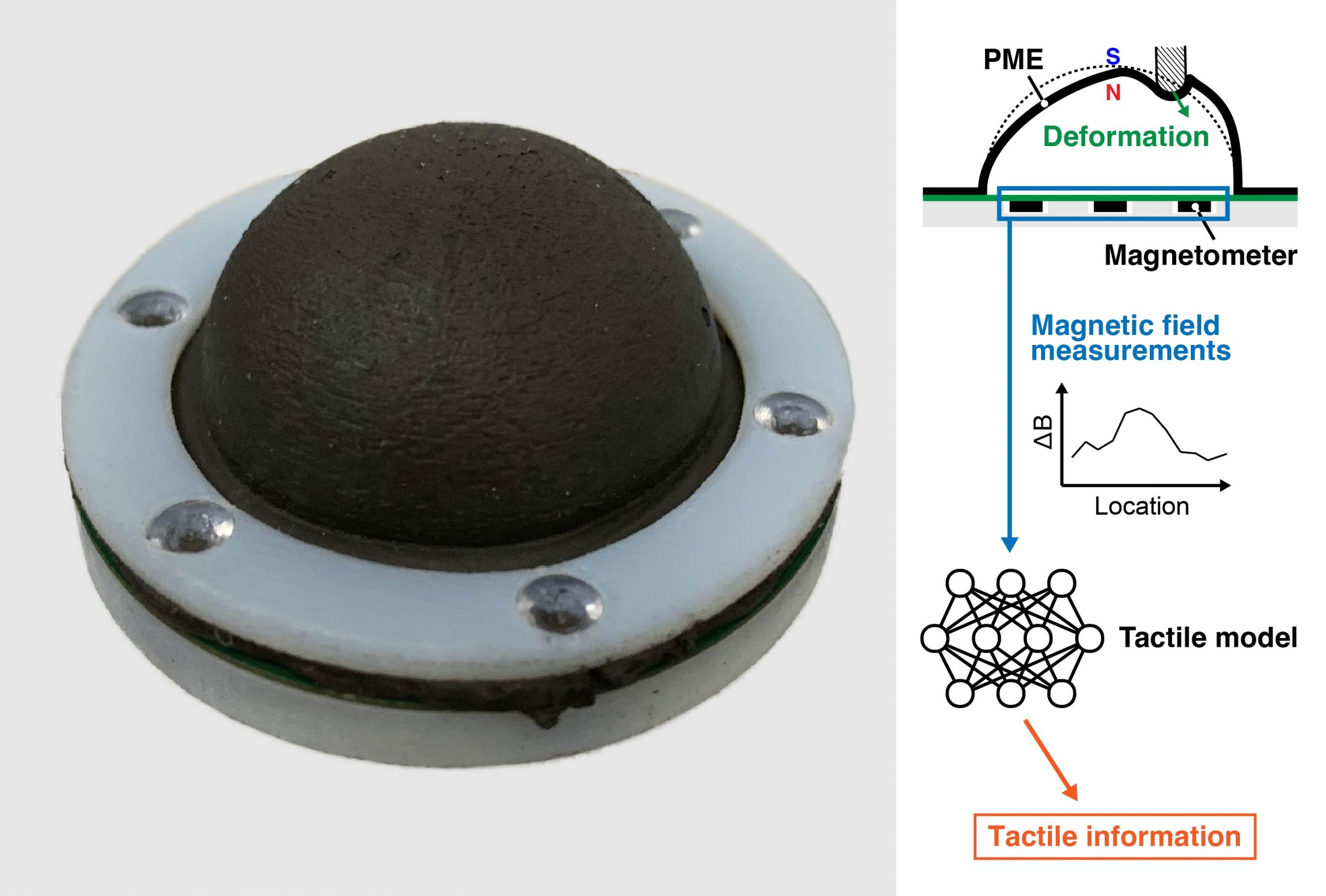
In recent years, soft robot hands have attracted much attention due to their ability to grasp objects without complicated control. In order to provide dexterity and robustness to such hands, tactile sensors are indispensable. However, existing tactile sensors are insufficient because they are not flexible or have limited ability to detect triaxial force. In this study, we propose a flexible tactile sensor using permanent magnet elastomer (PME), which can sense large triaxial deformation of its surface. The deformation is estimated from magnetic fields measured by magnetometers placed beneath the sensor. The free use of inside space and the low risk of electric failure without the need to place circuit elements on the sensor surface are advantages over optical sensors and stretchable pressure sensors. Experimental results showed that this sensor can detect applied triaxial force and classify different 3D deformations.
Ho Enomoto, Matthew Ishige, Takuya Umedachi, Hiroyuki Sakamoto, Yoshihiro Kawahara
Contact: enomoto@akg.t.u-tokyo.ac.jp