 折り紙・切り紙ロボットは、軽量・コンパクトで拡張性のあるロボット実現への道を開いている。しかし、折り紙・切り紙ロボットは、その大きさや材料の本質的な制限から、一般に機敏な動作の設計が困難である。本論文では、折り紙のwaterbomb構造が持つ双安定性を利用して、ロボットの俊敏な動きを生成する手法を提案する。我々は、waterbomb構造の双安定性を評価し、双安定構造の挙動解析に役立つように、胴体の形状を変えた折り紙ジャンパーを製作した。ジャンパーは相変化液体パウチアクチュエータで作動する。提案したジャンパーは軽量(0.3 g)で平らにすることができ、直径の12倍以上、高さの112倍までジャンプすることが可能である。
折り紙・切り紙ロボットは、軽量・コンパクトで拡張性のあるロボット実現への道を開いている。しかし、折り紙・切り紙ロボットは、その大きさや材料の本質的な制限から、一般に機敏な動作の設計が困難である。本論文では、折り紙のwaterbomb構造が持つ双安定性を利用して、ロボットの俊敏な動きを生成する手法を提案する。我々は、waterbomb構造の双安定性を評価し、双安定構造の挙動解析に役立つように、胴体の形状を変えた折り紙ジャンパーを製作した。ジャンパーは相変化液体パウチアクチュエータで作動する。提案したジャンパーは軽量(0.3 g)で平らにすることができ、直径の12倍以上、高さの112倍までジャンプすることが可能である。
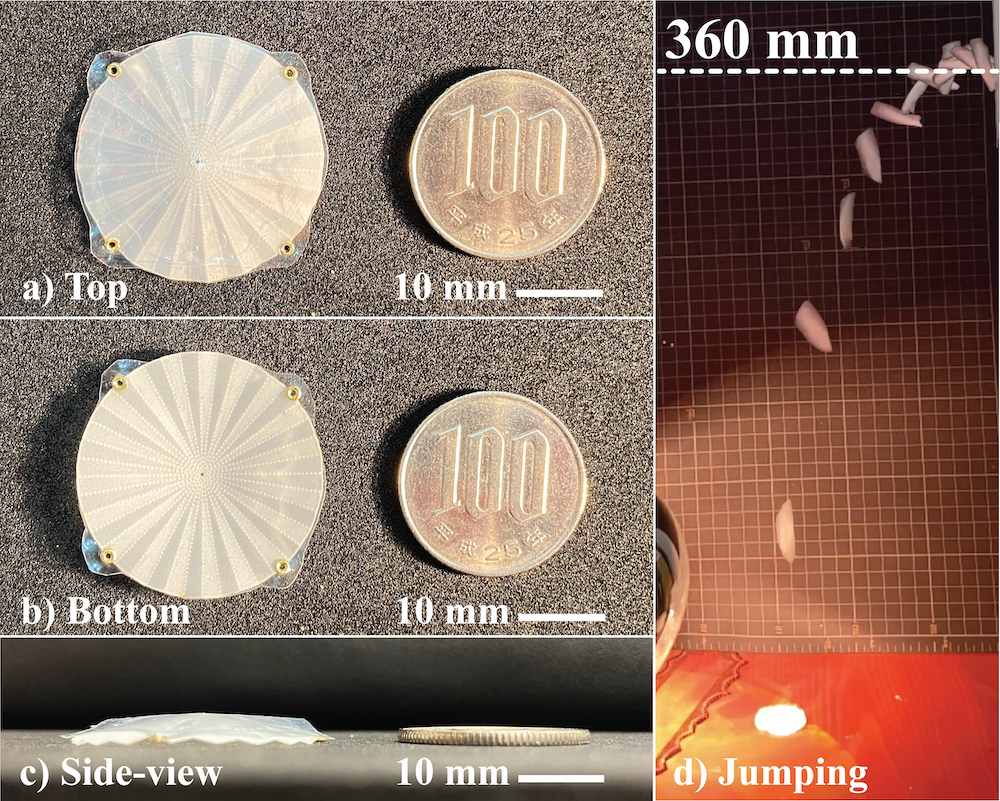
Origami/kirigami robotics are opening a path that leads to lightweight, compact, and expandable robots. However, it is generally challenging to design agile motions for origami/kirigami robots due to their size and the intrinsic limitation of the materials. In this paper, we propose to use the bistability of the waterbomb base structure to generate the swift motion of the robots. We evaluate the bistability of the waterbomb-based structure and build origami jumpers with different configurations of the body to help analyze the behavior of the waterbomb base bistable structure. The jumper is actuated by a phase change liquid pouch actuator. Our jumper is lightweight (0.3 g), flattenable, and able to jump to more than 12 times of its diameter and 112 times of its height.
Tung D. Ta, Zekun Chang, Koya Narumi, Takuya Umedachi, Yoshihiro Kawahara
Contact: tung@akg.t.u-tokyo.ac.jp