2025年10月19日、「ソフトロボット用新型アクチュエータの非線形ダイナミクスをAIで学習―リザバー計算でヒステリシスを学習、繊細なグリッパー動作へ―」のプレスリリースを発表しました。
(プレスリリース)
https://www.i.u-tokyo.ac.jp/news/press/2025/202510192687.shtml
https://www.t.u-tokyo.ac.jp/press/pr2025-10-20-001
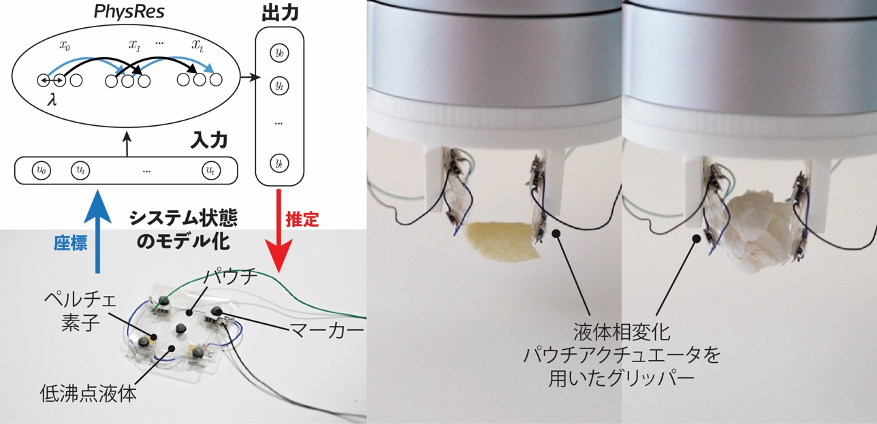
本研究では、ソフトロボット用の新しい駆動装置「液体相変化パウチアクチュエータ」の状態をAIで学習する技術を開発しました。
アクチュエータは温度の変化で液体が気化して膨らむ力で動きますが、 正確な制御が難しいという点が課題でした。
そこでAI技術「リザバーコンピューティング」を応用した独自手法「PhysRes」を使用することで、状態を高精度に予測することに成功しました。
開発したグリッパーは、ポテトチップスのような壊れやすい物体もつぶさずに掴むことができます。
本成果は、ロボットの身体そのものが情報処理を行う新しい仕組みである「身体性計算」の実現に向けた一歩であり、 ウェアラブル機器などへの応用が期待されています。
A press release was issued on October 19, 2025, titled: “Learning the Nonlinear Dynamics of Soft Actuators with AI: Hysteresis-based Reservoir Computing Paving the Way for Robotic Grippers Capable of Delicate Movements”
Press Release:
https://www.i.u-tokyo.ac.jp/news/press/2025/202510192687.shtml, https://www.t.u-tokyo.ac.jp/press/pr2025-10-20-001
In this study, we developed a technology that utilizes AI to model the states of a novel soft robot actuator: the “liquid-phase-change pouch actuator.” The actuator generates force as a low boiling point liquid vaporizes and expands as temperature increases. The difficulty of precise modeling caused by its complex, nonlinear motion remains a major challenge.
To tackle this, we succeeded in accurately predicting the actuator’s complex states using “PhysRes,” a method developed in our laboratory that applies an AI technique known as “Reservoir Computing.” We also demonstrated a gripper with such actuators can grasp fragile objects, such as a potato chip, without crushing them.
This achievement represents a significant step toward realizing “Morphological Computation” (or “Physical Computing”), a novel paradigm where the robot’s physical structure itself processes information. Its application is anticipated in fields such as wearable devices.
関連論文
Hysteretic reservoir
関連リンク
プロジェクトページ
https://github.com/tatung/liquidpouch_reservoir
学会情報
学会名:The 2025 IEEE/RSJ International Conference on Intelligent Robots and Systems(IROS 2025)
題 名:Modeling The States of Liquid Phase Change Pouch Actuators by Reservoir Computing
著者名:Cedric Caremel*, Khang Nguyen*, Anh Nguyen, Manfred Huber, Yoshihiro Kawahara,and Tung D. Ta, (*co-first authors)
https://iros25.org/
連絡先
東京大学大学院情報理工学系研究科
助教 タ デゥックトゥン(Tung D. Ta)
E-mail:tung@csg.ci.i.u-tokyo.ac.jp
東京大学大学院工学系研究科
特任助教 カレメル セドリック(Cedric Caremel)
E-mail:cedric@akg.t.u-tokyo.ac.jp