人間とロボットが安全に接触するためには、衝撃を吸収する柔軟性と外部刺激を正確に検知する触覚機能を兼ね備えた、生体に近い人工皮膚の実現が不可欠である。
従来の磁気粘弾性材料は柔軟なセンサ材料として有望視されているが、内部における磁性粒子の配向を均一に制御することが難しく、高精度な磁気センシングを実現する上での大きな障壁となっていた。また、材料組成が物理特性に与える影響が未解明なため、用途に応じた流動性の調整が困難であるという課題もあった。
本研究は、これら磁性材料における構造の不均一性と流動性の制御不能という問題を解決することを目的とする。
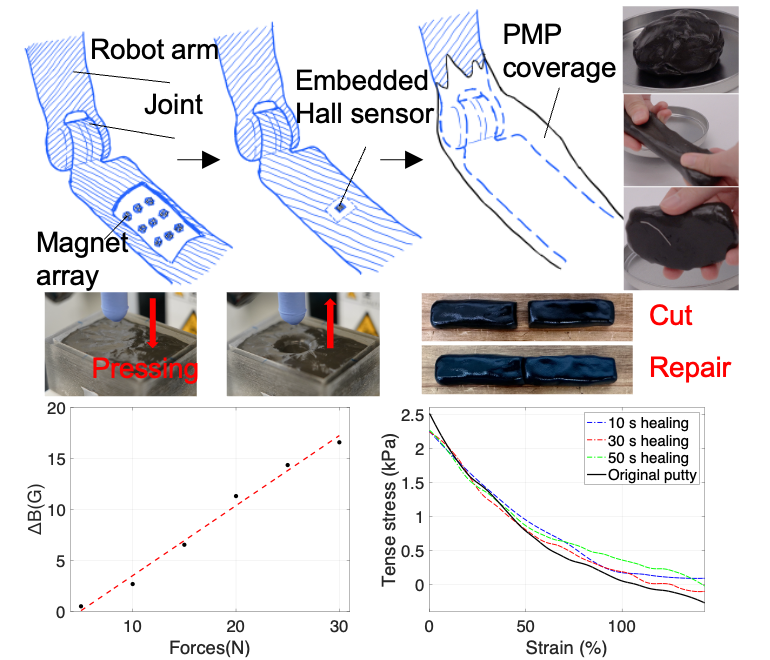
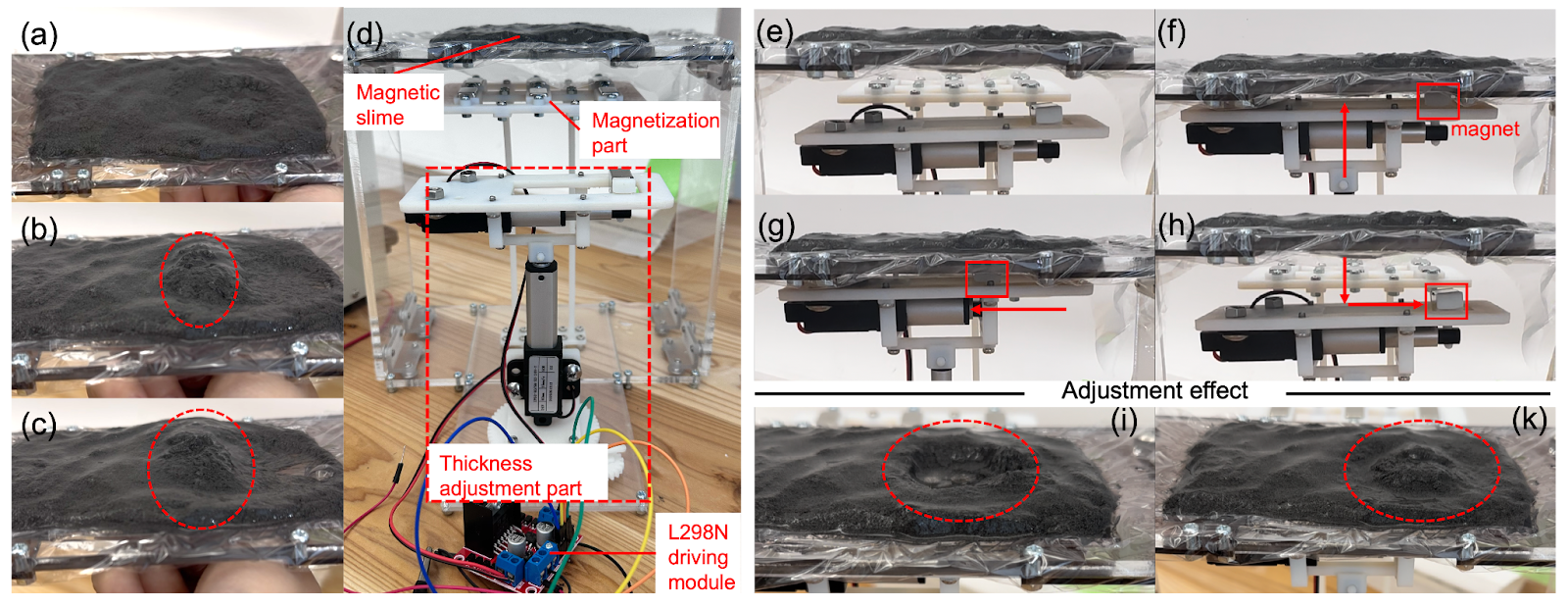
具体的には、永久磁石パテ(PMP)および磁性スライム(PMS)を新たに開発し、磁石アレイを用いて粒子を強制的に再整列させる独自の「磁性再整列」手法を提案することで、組成と物性の相関に基づく精密な設計を可能にした。
実験の結果、開発したPMPは切断後10秒以内に強度の90%以上を回復する高い自己修復能を示し、市販材料の約2倍のセンシング感度(0.068 mT/N)を達成した。
本成果は、材料の動的な再構成と計測機能を両立させる新たなアプローチであり、医療リハビリや協働ロボットの安全性を飛躍的に高める次世代技術としての応用が期待される。
For robots to interact safely with humans, it is essential to develop bio-inspired artificial skins that integrate impact-absorbing flexibility with precise tactile sensing functions. Conventional magnetorheological materials are promising candidates for soft sensors; however, the difficulty in controlling the alignment of internal magnetic particles has remained a major barrier to achieving high-precision magnetic field-based sensing. Furthermore, the lack of a quantitative understanding of how material composition affects physical properties has made it challenging to tailor fluidity for specific applications. This study aims to simultaneously overcome the challenges of structural non-uniformity and uncontrollable fluidity in magnetic viscoelastic materials. We developed Permanent Magnet Putty (PMP) and Permanent Magnet Slime (PMS) and proposed a unique “magnetic realignment” process using magnet arrays to ensure uniform particle orientation, thereby enabling the precise design of physical characteristics based on composition. Experiments demonstrated that the PMP recovers over 90% of its strength within 10 seconds of being cut and achieves a sensing sensitivity (0.068 mT/N) approximately twice that of commercial materials. These results provide a novel approach that integrates dynamic material reconfiguration with sensing functionality, offering a next-generation technology to significantly enhance the safety of medical rehabilitation and collaborative robotics.
Zhao Ruotong, Kamezaki Mitsuhiro, Iwamoto Yuhiro, Dobashi Ryosuke, Hayashi Mikihiro, Wang Yushi, Kawahara Yoshihiro
関連論文/Related Publications
R. Zhao, M. Kamezaki, R. Dobashi, Y. Iwamoto, Y. Ido, and Y. Kawahara, “A Self-Healing Permanent Magnet Putty for Soft Robot Skins With Force Sensing and Functional Recovery,” Advanced Robotics Research, e202500143, Nov. 2025.