Skip to content
KAWAHARA LABORATORY
Toggle Navigation
MENU
ABOUT
MEMBER
RESEARCH
Publications
AWARDS & MEDIA
NEWS
ACCESS
RESEARCH GROUP
ALL
Human computer interaction / Digital fabrication
Inclusive Wearable
Network
Robotics
Sensing and data mining
Sensor systems
Smart agriculture
Wireless power transfer / Energy harvesting
芝慎太朗が、SSII2026にてオーディエンス賞を受賞しました
三宅斗希が、DICOMO2026にて優秀プレゼンテーション賞を受賞しました
髙橋和希が、DICOMO2026にて優秀プレゼンテーション賞を受賞しました
山中湖にて合宿形式の研究ディスカッションを実施しました
2026年度の新メンバーをご紹介します!
高橋亮が、IEEE RA-L 2025 Best Paper Awardを受賞しました
高橋亮が、公益財団法人 船井情報科学振興財団による船井研究奨励賞を受賞しました
平田駿輔が、情報処理学会第88回全国大会にて大会奨励賞を受賞しました
Berkeley AI Research (BAIR)およびMeta FAIRのToru Lin氏によるリサーチトークが開催されました
新たな門出へ。修士5名・学士4名が修了・卒業を迎えました
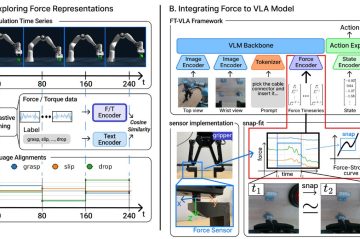
力触覚モダリティの解釈及び手応えを理解する行動生成モデルの構築
Interpretation of Haptic Modality and Construction of a Behavior Generation Model for Understanding Interaction Feedback
話者非依存日本手話認識におけるMovement-Holdモデルに基づくキーフレーム選択の有効性と課題
Effectiveness and Challenges of keyframe selection based on the Movement-Hold model for Signer-Independent Japanese Sign Language recognition
大規模言語モデルによる探索誘導を用いたモデルフリー強化学習空調制御の学習効率の向上
Improving Learning Efficiency of Model-Free Reinforcement Learning for HVAC Control via Large Language Model-Guided Exploration
磁気応答粘弾性材料を用いた力計測・厚み調整・自己修復機能を有するソフトロボットスキンに関する研究
Soft Robotic Skin with Force Sensing, Thickness Adjustment, and Self-Healing Capability Using Magnetically Responsive Viscoelastic Materials
超低電力な指輪型無線マウス
Ultra-low-power ring-based wireless mouse
投稿ナビゲーション
過去の投稿