Skip to content
KAWAHARA LABORATORY
Toggle Navigation
MENU
ABOUT
MEMBER
RESEARCH
Publications
AWARDS & MEDIA
NEWS
ACCESS
RESEARCH GROUP
Robotics
ALL
Human computer interaction / Digital fabrication
Inclusive Wearable
Network
Robotics
Sensing and data mining
Sensor systems
Smart agriculture
Wireless power transfer / Energy harvesting
poimo – Portable and Inflatable Mobility – (2020)
A LIVE UN LIVE
空気圧と腱で駆動するソフトインフレータブル構造
Low-Pressure Soft Inflatable Structure driven by inner tendon
センサーとアクチュエータの一括印刷で作るソフトロボット
Instant Inkjet Actuators and Sensors for Soft-bodied Crawling Robots
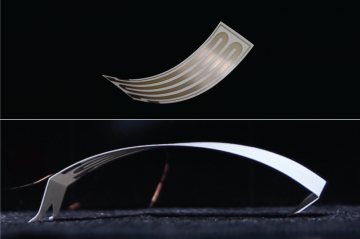
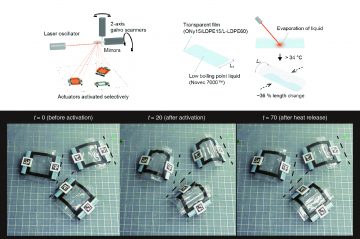
レーザー熱投影によるワイヤレス・選択的な相転移アクチュエータ駆動
Selective and Wireless Activation of Soft Actuators by Laser-powered Liquid-gas Phase Change
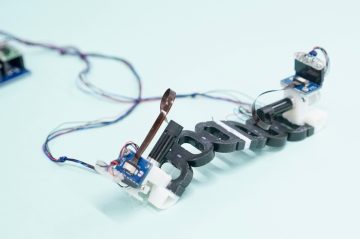
複数の変形モードを活用し這行するイモムシ型ソフト・ロボット
Caterpillar-inspired Crawling Robot using Both Compression and Bending Deformations
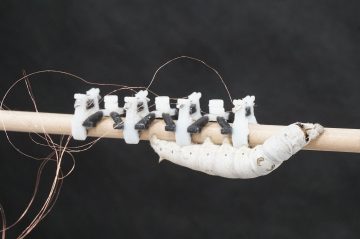
枝や電線上で使用可能なイモムシ型ソフト・ロボット
A Caterpillar-inspired Soft-bodied Robot that Crawls on Branches and Wires Resiliently
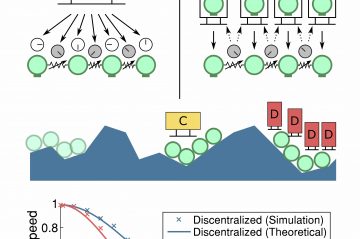
イモムシ型ロボットの足を離すタイミングの進行速度に対するロバスト性
Relationship between Release Time Control of Each Leg and Crawling Velocity in Caterpillar-like Robot
Papilion
Papilion
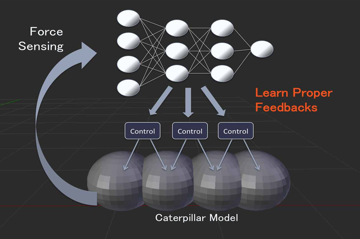
ソフトロボットの力覚フィードバックを用いた適応制御
Adaptive Control of Soft-bodied Robots with Force Sensing Feedback
Caterpilike: イモムシに着想を得た柔らかいロボット
Caterpilike: a soft-bodied robot inspired by caterpillars
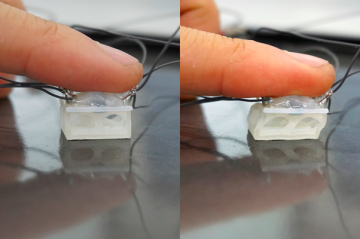
ソフトロボットと一括造形する3次元大変形センサ
3D deformation sensor printed with soft-bodied machines
投稿ナビゲーション
新しい投稿