Skip to content
KAWAHARA LABORATORY
Toggle Navigation
MENU
ABOUT
MEMBER
RESEARCH
Publications
AWARDS & MEDIA
NEWS
ACCESS
RESEARCH GROUP
Robotics
ALL
Human computer interaction / Digital fabrication
Inclusive Wearable
Network
Robotics
Sensing and data mining
Sensor systems
Smart agriculture
Wireless power transfer / Energy harvesting
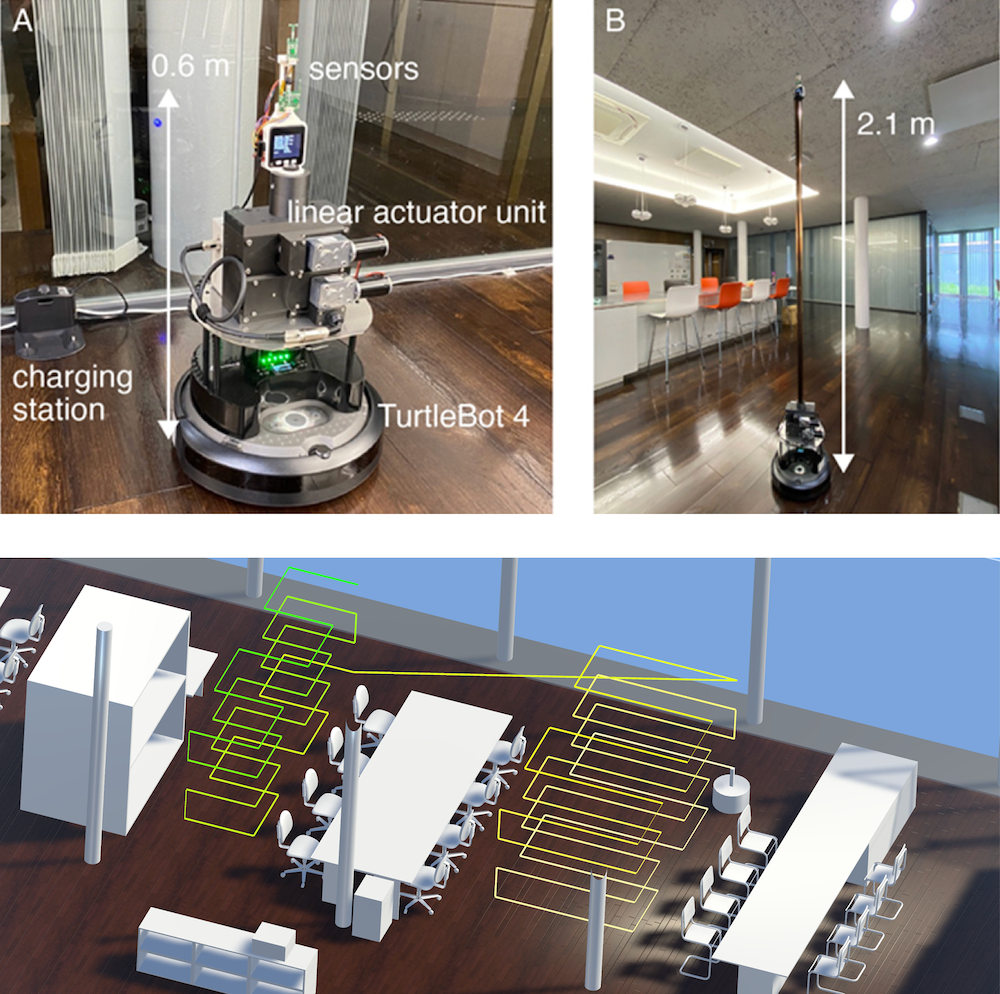
Acquisition and Visualization of HVAC Data by Autonomous Mobile Robots
Modeling The States of Liquid Phase Change Pouch Actuators by Reservoir Computing
LLMによる触覚解釈に基づくロボットマニピュレーションの行動選択
Action Selection in Robotic Manipulation Based on Tactile Interpretation Using LLM
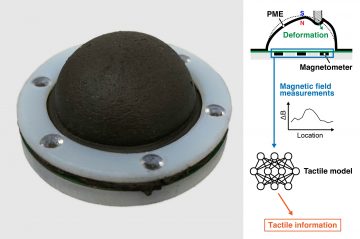
磁気粘弾性材料を用いたソフトロボットスキン
Soft Robot Skin Using Magnetorheological Materials
インナーワイヤレスな移動関節型ヘビロボット
Joint-repositionable inner-wireless snake robot
キューブ型跳躍ロボット
Jumping Cube
パーソナルモビリティの操作支援
Operational Support for Personal Mobility
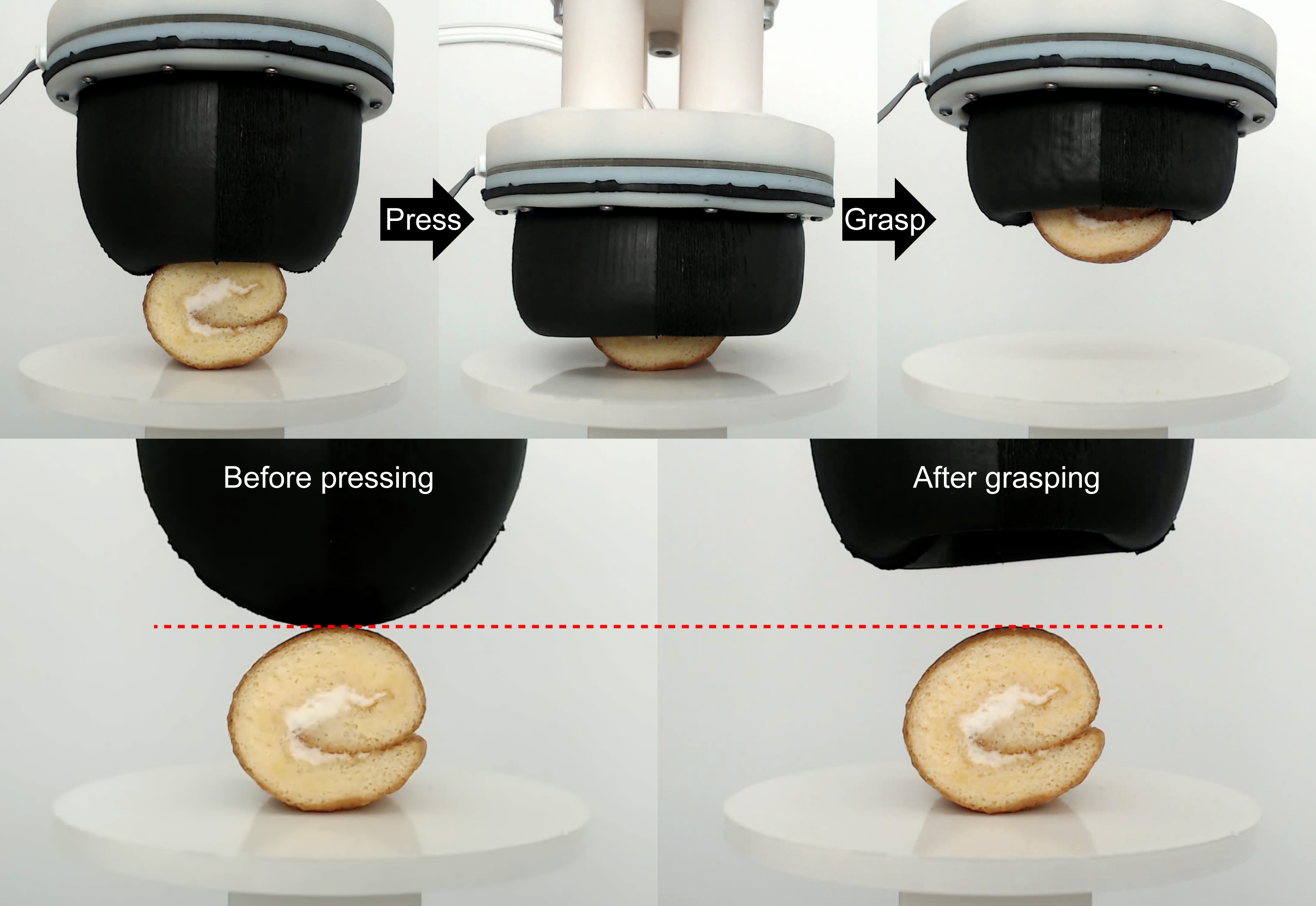
繊細なジャミング把持:永久磁石エラストマ膜を用いた壊れやすい把持対象の変形検出
Delicate Jamming Grasp: Detecting Deformation of Fragile Objects Using Permanent Magnet Elastomer Membrane
やわらかい身体を利用した不整地・狭小空間でのモビリティ走行制御
Smart Mobility Control Using Soft Body in Rough Terrain and Narrow Spaces
ソフトアクチュエータ制御のためのEcho State Network
Echo State Network for Soft Actuator Control
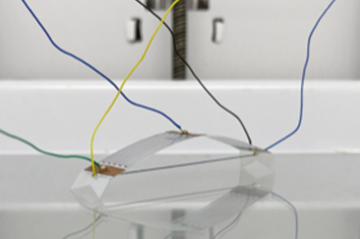
ソフトロボットハンドのための永久磁石エラストマを用いた大変形可能な触覚センサ
Largely Deformable Tactile Sensor Using Permanent Magnet Elastomer for Soft Robot Hands
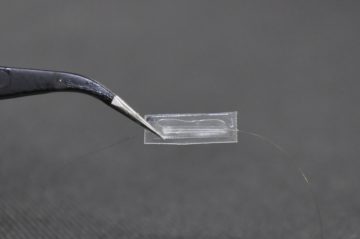
液体金属ヒータを内蔵した全構造が柔軟な相転移アクチュエータ
Fully Flexible Liquid-to-gas Phase Change Actuators with Integrated Liquid Metal Heaters
HaPouch:相転移アクチュエータを用いた小型かつ柔軟なウェアラブル触覚ディスプレイ
HaPouch:A Miniaturized, Soft, and Wearable Haptic Display Device Using a Liquid-to-gas Phase Change Actuator
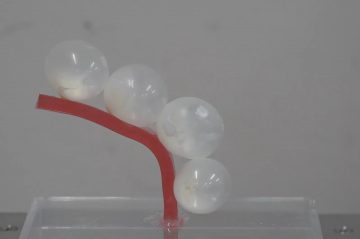
Micro Elastic Pouch Motors:弾性変形可能な小型相転移アクチュエータ
Micro Elastic Pouch Motors:Elastically Deformable and Miniaturized Soft Actuators Using Liquid-to-Gas Phase Change
A Multigait Stringy Robot with Bi-stable Soft-bodied Structures in Multiple Viscous Environments
投稿ナビゲーション
過去の投稿